HMS Graduate Program
Contact Information
Mailing Address
Cleveland State University, Washkewicz College of Engineering
2121 Euclid Ave., WH 305
Cleveland, Ohio 44115-2214
Campus Location
Washkewicz Hall Room 305
2300 Chester Avenue
Phone: 216.687.3954
nrt@csuohio.edu
Web Only Contact
Phone: 216.687.3954
nrt@csuohio.edu
Physical and Social Human-Machine Interactions
Overview
This Team's long-term objective is to create technologies that improve individuals' abilities to access, engage with, and manipulate their physical, social, and sensory environments. They focus on the environment realm of the IET framework, but necessarily must focus first on the individual. This might include leveraging technology to assess how individuals currently move within or engage with their environment so that the environment or the tasks can be adapted through technology to be more accessible. It also might involve leveraging technology to augment the person's capabilities directly or to help build their capability to access and engage with their environment.
Example Projects
Foust (OT) has developed protocols utilizing harness-based assistive technologies for children with developmental disabilities and Espy (PT) has developed harness assisted, balance and mobility training protocols for adults with balance impairments. Richter (ENG) has built experimental platforms and designed human-machine interaction control strategies optimizing human performance outcomes.
The PLAAY on the Move program, co-developed by Faust, has created protocols utilizing harness-based assistive technologies for children with developmental disabilities. These technologies show great promise in improving children's engagement, activity, social interactions, and physical and language development. Measurement of these outcomes, however, is subjective and rudimentary. For children using a harness system to facilitate movement and posture, the challenge is to objectively identify indicators of activity initiation, engagement, and sustained attention. Occupational, Physical, and Speech-Language therapists are skilled at recognizing these indicators, for example, through a child's movements, postural set, visual scanning, or gaze fixation within the context of a therapy session. That is quite different from systematically identifying and quantifying these subtle and highly individual and variable movements and behaviors over time and across children. Further development, efficacy and dosing studies, and individual prescription are severely hampered due to the lack of objective measures of changes in environmental access and utilization through harness system use. A convergent research approach would bring to bear engineering and artificial intelligence expertise to propose and develop sensors, harness support controls, and measures for the potential outcomes' indicators identified by rehab and developmental specialists.

A child who cannot independently stand or walk uses the PLAAY on the Move system. He demonstrates physical interaction with his environment, social engagement, sustained attention to activity and objects, people, and motor initiation to maintain postural control and orientation within the environment.

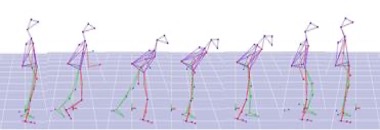
Examples of uses of a Harness for balance Training.
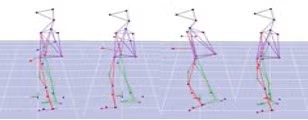
Kinematics collected for a Fall (upper panel) vs. a recovery (lower panel).
Richter (ENG) has built experimental platforms and designed human-machine interaction control strategies optimizing human performance outcomes. Robot Assisted Diagnosis and Intervention (RADI) has been designed to quantify dynamic muscle activity of the shoulder during functional movements and to then provide targeted, variable resistance throughout motions to restore optimal muscle activity. The same technology development is being applied to design collaborative human-robot interfaces for physical assistance robots. Other work has been in the design of the Smart Walker, which provides dynamic and programmable support to the user to target the optimal level of support for safety vs. user effort for posture and strength. A convergence team focus on this research could transform what is understood about movement, complex muscle function and muscle and joint injury, disease, and dysfunction and provide currently unavailable tools for the effective diagnosis and treatment of musculoskeletal dysfunction.

The Smart Walker providing dynamic support and improved posture and alignment.
Faculty Members

Debbie Espy
Debbie is an Associate Professor in the College of Health, Department of Physical Therapy. Her clinical background includes work in acute care, inpatient and outpatient neuro-rehabilitation, assistive technology, and geriatrics, and her research interests are in the areas of motor learning, postural control, balance training, fall prevention, exercise dosage, therapeutic aspects of video gaming and virtual reality, and the use of sensor technologies to provide exercise and motor learning feedback. She has developed measurement tools and algorithms for balance training, as well as clinical decision-making models for the use of VR and active gaming in therapeutic settings.
Ph.D., Movement Science, University of Illinois at Chicago, 2010
M.S.,Physical Therapy, Medical College of Virginia and
Virginia Commonwealth University, 1992
B.A., Biology/Pre-Physical Therapy, College of Wooster, 1989

Kelle DeBoth Foust
Kelle is an Associate Professor in the College of Health, Department of Occupational Therapy. Her area of expertise in clinical practice is working with children with autism and sensory processing disorders. She completed specialized certification in the Sensory Integration and Praxis Tests (SIPT), becoming SI certified in 2006. Her research work has focused on identifying sensory-based subtypes in children with autism and exploring related neurophysiological and functional behavior correlates of these subtypes. Current research interests include multisensory processing in autism and sensory processing disorders, neurophysiology of multisensory processing, interprofessional education, multidisciplinary interventions for children with fine motor delays (such as music therapy and OT collaborations), mental health and resilience training in children who have experienced trauma, objective measurement of sensory responsivity in natural environments during occupational engagement, and advanced technologies and quality of life in communities and disability populations.
Ph.D., Health Related Sciences; Occupational Therapy,
and Virginia Commonwealth University, 2016
MOT, Occupational Therapy, University of Pittsburgh, 2004
B.A., Biological Sciences, University of Southern California, 2002
Hanz Richter
Hanz is a Professor in the Department of Mechanical Engineering. He conducts research in the broad areas of control theory and applications, robotics and mechatronics, system modeling, and optimization, with application areas which include biomedical robots, prostheses, advanced exercise machines, aeroengine propulsion control, high-precision motion control, and piezoelectric actuators and sensors.
Ph.D., Mechanical Engineering, Oklahoma State University, 2001
M.S., Mechanical Engineering, Oklahoma State University, 1997
B.S., Mechanical Engineering, Catholic University of Peru, 1994

Nick Zingale
Nick has over 30 years of academic and professional experience in higher education, public sector projects, and private sector consultation. He is an Associate Professor in the School of Urban Affairs at Cleveland State University and a Visiting Professor at Case Western Reserve University. He is the co-director of the CSU T.E.C.H. Hub, co-director at the Human Fusions Institute, director of HELPPS -- a transdisciplinary team addressing the implications of advanced technology in society, and co-director of the Institute of Applied Phenomenology. Dr. Zingale's research and teaching is at the intersection of phenomenology, advanced technology, and administrative governance. He is an internationally invited speaker on governance and technology in society and is working on a book investigating Society 5.0 and the future of life and human experience.
Post Doctoral Fellowship, Harvard University Kennedy School of Government, 2007
Ph.D., Public Affairs, University of Akron, 2004
M.B.A., Business Administration, Baldwin Wallace University, 1993
B.S., Environmental Science and Health, Bowling Green State University, 1989
Contact Information
Mailing Address
Cleveland State University, Washkewicz College of Engineering
2121 Euclid Ave., WH 305
Cleveland, Ohio 44115-2214
Campus Location
Washkewicz Hall Room 305
2300 Chester Avenue
Phone: 216.687.3954
nrt@csuohio.edu
Web Only Contact
Phone: 216.687.3954
nrt@csuohio.edu